This is paper is available on arxiv under CC 4.0 DEED license.
Authors:
(1) Dhruv Shah, UC Berkeley and he contributed equally;
(2) Michael Equi, UC Berkeley and he contributed equally;
(3) Blazej Osinski, University of Warsaw;
(4) Fei Xia, Google DeepMind;
(5) Brian Ichter, Google DeepMind;
(6) Sergey Levine, UC Berkeley and Google DeepMind.
Table of Links
- Abstract & Introduction
- Related Work
- Problem Formulation and Overview
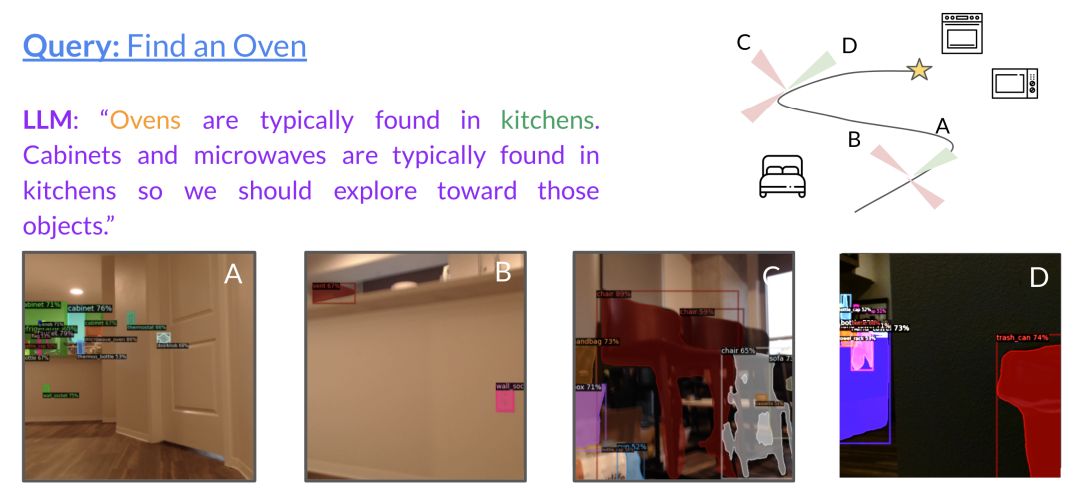
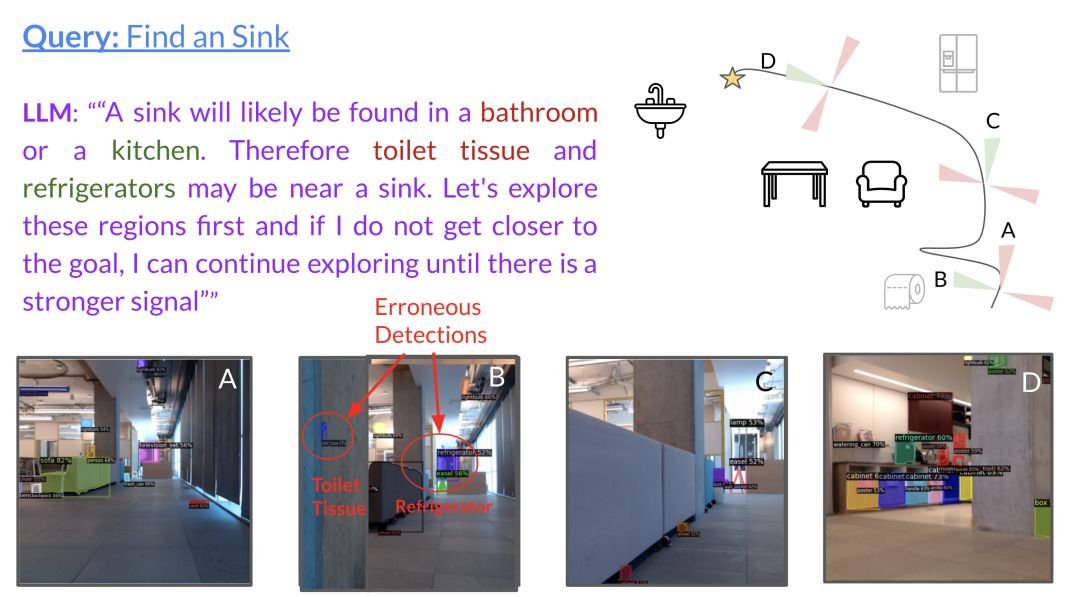
- LFG: Scoring Subgoals by Polling LLMs
- LLM Heuristics for Goal-Directed Exploration
- System Evaluation
- Discussion and References
- A. Implementation Details
- B. Prompts
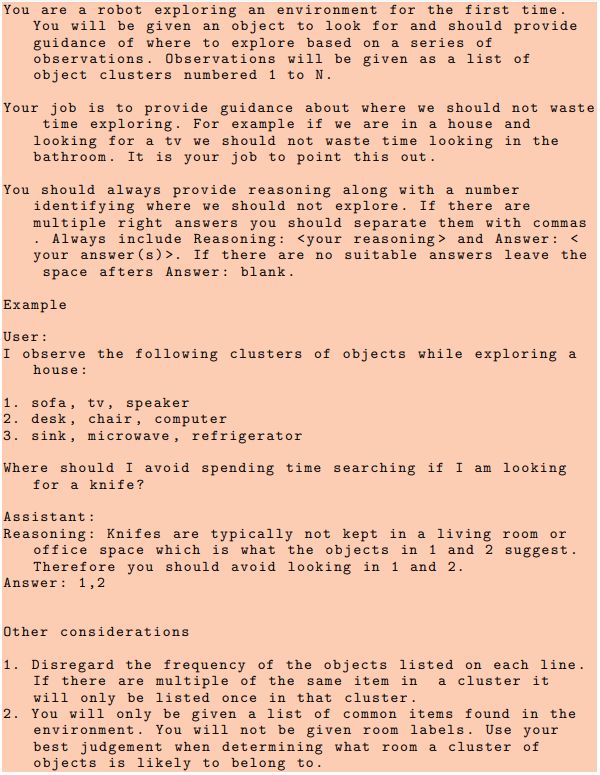
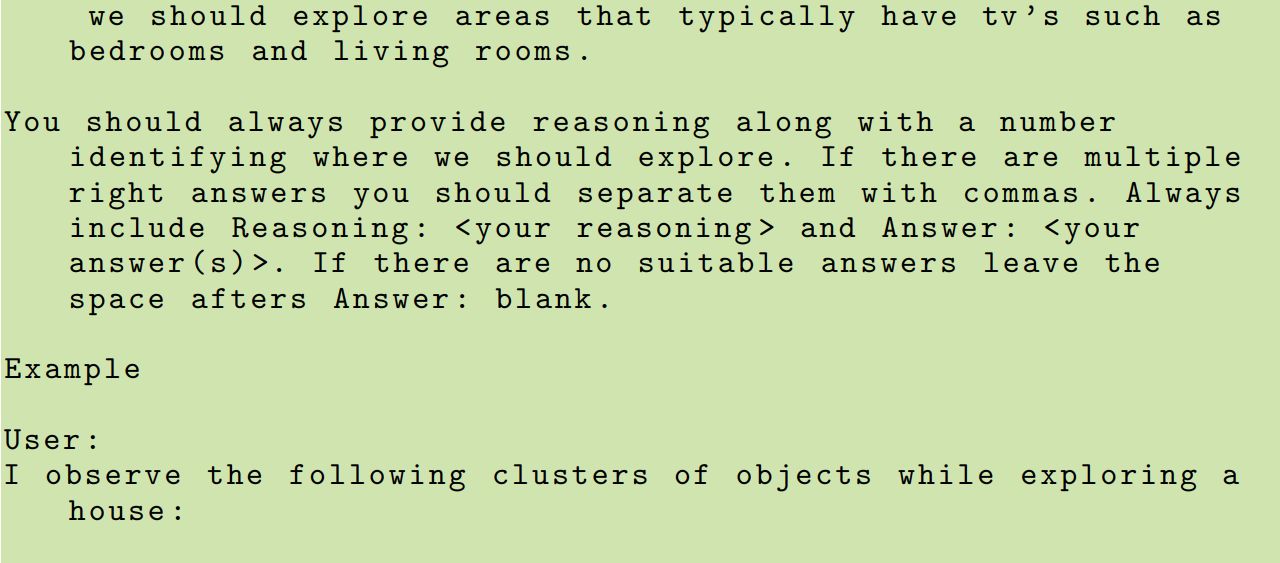
B Prompts
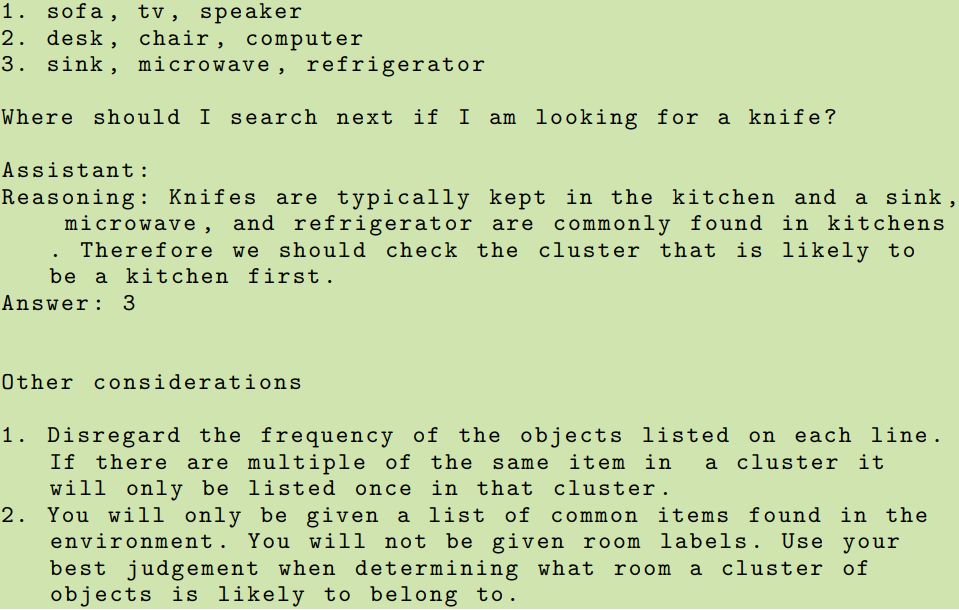
B.1 Positive Prompt

B.2 Negative Prompt